Nama: Muhammad Firdaus Abdi
Nim : 310112021966
Judul : Minimun sisterm koneksi dua arduino sistem paralel

PROGRAM STUDI TEKNIK INFORMATIKA
BAB I




BAB III





Sensor Ultrasonik Devantech srf05 dengan spesifikasi sebagai berikut :






BAB IV
Dari tabel diatas bahwa banyak perubahan dari robot sebelumnya dan yang sekarang.
BAB V
Nim : 310112021966
Judul : Minimun sisterm koneksi dua arduino sistem paralel
MINIMUM SISTEM KONEKSI DUAL ARDUINO DENGAN SISTEM PARALEL
OLEH:
MUHAMMAD FIRDAUS ABDI
3101 1202 1966
PROGRAM STUDI TEKNIK INFORMATIKA
SEKOLAH TINGGI MANAJEMEN INFORMATIKA DAN KOMPUTER BANJARBARU
(STMIK BANJARBARU)
BANJARBARU
2015
DAFTAR ISI
DAFTAR ISI
BAB I
PENDAHULUAN
1.1 Latar Belakang 2
1.2 Permasalahan Penelitian 3
1.2.1 Identifikasi Masalah 3
1.2.1 Identifikasi Masalah 3
1.2.2 Ruang Lingkup Masalah 3
1.2.3 Rumusan Masalah 3
1.3 Tujuan Dan Manfaat 3
1.3.1 Tujuan 3
1.3.2 Manfaat 3
BAB II
LANDASAN TEORI DAN KERANGKA PEMIKIRAN
2.1 Tinjauan Pustaka 4
2.1.1 Rancang Bangun Robot Quadropod Pendeteksi
Halangan Dengan Menggunakan Logika Fuzzy
(Brahmanto Utama Atmaja,2011). 4
2.1.2 Implementasi MetodeFuzzy Logic untuk Kontrol
Pergerakan Autonomous Mobile Robot pada Aplikasi
Soccer Robot (Moh. Hisyam Fithrony, 2012) 4
2.2 Landasan Teori
2.2.1 1Atmega168/328 5
2.2.2 Metode Komputasi 7
2.2.3 Contoh Kasus 11
2.2.3.1 Fuzzifikasi 11
2.2.3.2 Evaluasi Aturan 12
2.2.3.3 Defuzzifikasi 13
BAB III
METODELOGI PENELITIAN
3.1 Analisa Kebutuhan 17
3.1.1 Metode Pengumpulan Data 18
3.1.2 Jenis Data 18
3.2 Perancangan Penelitian 26
3.2.1 Konteks Diagram 26
3.2.2 Use Case Diagram 27
3.2.3 Squence Diagram 27
3.2.4 Activity Diagram 28
3.3 Teknik Analisa 28
3.3.1 Fuzzifikasi 28
3.3.2 Sampel Pengujian Sensor 29
BAB IV
HASIL DAN PEMBAHASAN
4.1 Hasil 30
4.2 Pembahasan dan pengujian 30
4.2.1 Pengujian Sensor 30
4.2.2 Pengujian pretest dan posttest 31
BAB V
PENUTUP
5.1 Kesimpulan 32
5.2 Saran 32
DAFTAR PUSTAKA
BAB I
PENDAHULUAN
Latar Belakang
Kontes Robot Pemadam Api Indonesia (KRPAI) khusus nya berkaki setiap tahunnya diadakan oleh Direktorat Pendidikan Indonesia (DIKTI) yang bertujuan untuk meningkatkan mutu pendidikan. Acara tahunan ini dijadikan sebagai media untuk menyalurkan minat dan bakat mahasiswa dibidang teknologi robotika. Diajang ini robot yang ikut serta dalamnya dituntut untuk dapat menjelajahi arena yang merupakan simulasi sebuah rumah, kemudian mencari dimana sumber api berada kemudian memadamkanya. Setelah semua arena telah dijelajahi dan api telah dipadamkan robot harus dapat kembali keposisi awal dimana robot diberangkatkan. Dan Kelengkapan robot yang mendukung robot berkerja dengan baik yaitu sensor yang bekerja sebagai pembaca arah dari robot tersebut agar tidak membentur atau menabrak diding.
Bedasarkan penelitian yang dilakukan yaitu pembuatan robot berkaki yang dimana ada komponen komponen pendukung yang dipasangkan pada robot berkaki yaitu sensor SRF-05 PING)), servo, sensor api, kipas, sound activasi,arduino nano V3.0. komponen tersebut sangat berperan penting dalam pembuatan pada robot berkaki agar bisa berjalan sesuai dengan perintah atau prosedur yang telah dibuat.
Kekurangan pin digital pada 1 arduino membuat peralatan atau perlengkapan pada robot berkaki tidak terpenuhi, yang dimana 1 arduino memiliki 12 pin digital yang bisa digunakan, sedangkan untuk kaki robot sudah menggunakan 8 pin digital dan hanya menyisakan 4 pin digital saja, untuk sensor menggunakan 6 pin digital, maka dibutuhkan pin digital tambahan untuk melengkapi sisa kekurangan pin digital pada 1 arduino.
Dengan dilakukan menerapkan dual microprocessor pada robot berkaki atau 2 arduino maka bisa melengkapi kekurangan yang sebelumnya hanya hanya bisa menggunakan 1 sensor untuk 1 ardunio, sekarang bisa menggunakan 4 sensor ditambah 1 sensor api dan sound activasi, yang
berfungsi 1 arduino sebagai master dan 1 arduino sebagai slave dengan teknik paralel.
1.2. PERMASALAHAN PENELITIAN
1.2.1. Identifikasi Masalah
Menutupi kekurangan PIN Digital pada arduino nano V3.0 untuk sensor SRF-05 agar robot dapat berjalan menelusuri dinding.
1.2.2. Ruang Lingkup Masalah
Menerapkan dua ardunio nano v3.0 dengan paralel dan cara komunikasi dua arduino.
1.2.3. Rumusan Masalah
Bagaimana menerapkan logika fuzzy koneksi dual microprocessor untuk memenuhi kekurangan pin digital pada robot ?
1.3.Tujuan Dan Manfaat
1.3.1.Tujuan
Agar kekurangan pin digital pada sebelumnya untuk sensor SRF-05, sensor api dan seound activasi dapat terpenuhi.
1.3.2.Manfaat
- Manfaat dual microprocessor dapat menggunakan 4 sensor ultrasonik dan robot berjalan tidak akan menyentuh dinding.
- Dapat mempelajari lebih dalam sistem kontrol dua microprocessor untuk penggunaan pada robot berkaki.
- Sebagai dasar pengembangan robot berkaki pada tim robotik Stmik Banjarbaru dengan nama “BALINGKANG”.
BAB II
LANDASAN TEORI DAN KERANGKA PEMIKIRAN
2.1 Tinjauan Pustaka
2.1.1 Rancang Bangun Robot Quadropod Pendeteksi Halangan Dengan Menggunakan Logika Fuzzy (Brahmanto Utama Atmaja,2011).
Pada penelitian ini dilakukan perancangan pergerakan robot berkaki empat agar dapat berjalan dengan baik dan membuat sistem yang dapat mengatur kecepatan langkah kaki robot berdasarkan jarak halangan yang terdeteksi oleh sensor ultrasound, dan diproses dengan menggunakan metode Kontroller logika fuzzy. Logika Fuzzy yang digunakan dalam penelitian ini adalah Metode Sugeno. Penalaran ini hampir sama dengan penalaran MAMDANI, hanya saja output (konsekuen) sistem tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan linear. Perancangan arsitektur sistem dalam penlitian ini adalah mikrokontroler sebagai pemroses akan mendapatkan data input dari satu modul ultrasound. Modul ultrasound akan memberikan data berupa jarak antara robot dengan penghalang didepan modul ultrasound kemudian data tersebut diolah, dalam hal ini proses fuzzifikasi sedang berjalan. Hasil dari proses fuzzifikasi adalah untuk mengatur kecepatan langkah kaki robot quadropod yang digerakan oleh empat motor servo. Perangkat keras yang digunakan seperti Microcontroller ATMega8535, Sensor Ultrasound PING)))™, Mini – Servomotor, dan Modul Display merupakan modul yang berfungsi untuk menampilkan intruksi-intruksi program yang akan dijalankan dan informasi waktu yang dikirim oleh microcontroller.
2.1.2 Implementasi MetodeFuzzy Logic untuk Kontrol Pergerakan Autonomous Mobile Robot pada Aplikasi Soccer Robot (Moh. Hisyam Fithrony, 2012).
Pada penelitian ini dilakukan perancangan Autonomous Mobile Robot dengan kemampuan untuk mengejar target berupa sebuah bola dengan warna tertentu (bola tenis meja warna oranye) dan kemampuan
untuk menghindari halangan dengan sensor pendeteksi berupa ultrasonik. Untuk melakukan gerakan atau manuver, robot menggabungkan kedua kemampuan tersebut dengan teknik pengambilan keputusan pemanfaatkan algoritma logika fuzzy. Logika Fuzzy yang digunakan dalam penelitian ini memerlukan tiga proses dasar, yakni fuzzyfikasi, evaluasi rule, dan defuzzyfikasi. Pada proses fuzzyfikasi, masukan berupa data valid yang biasa disebut Crisp Input, yang akan diolah menjadi fuzzy input. Setelah proses fuzzyfikasi selesai, dilakukan evaluasi rule, rule yang akan dibuat ini, bergantung dari pengalaman dari perancang sistem, semakin banyak pengalaman, maka semakin baik pula hasil yang didapat. Tahap terakhir adalah defuzzyfikasi, yang mengambil keluaran fuzzy dari setiap label, untuk dijadikan output crisp. Perancangan arsitektur sistem dalam penlitian ini Perancangan sistem dalam penlitian ini terdiri dari blog diagram perencanaan sistem, perencanaan mekanik, perencanaan hardware dan perencanaan software. Perancangan hardware pada penelitian ini menggunakan ATMEGA 128 sebagai master untuk melakukan akuisisi data, penyimpanan data maupun untuk melakukan komunikasi dengan hardware lainnya. Software yang digunakan dalam penelitian ini menggunakan bahasa pemrograman jenis C, untuk compiler yang dipakai menggunakan codevisionAVR karena memiliki wizard untuk menghasilkan konfigurasi yang dibutuhkan.
2.2 Landasan Teori
2.2.1Atmega168/328
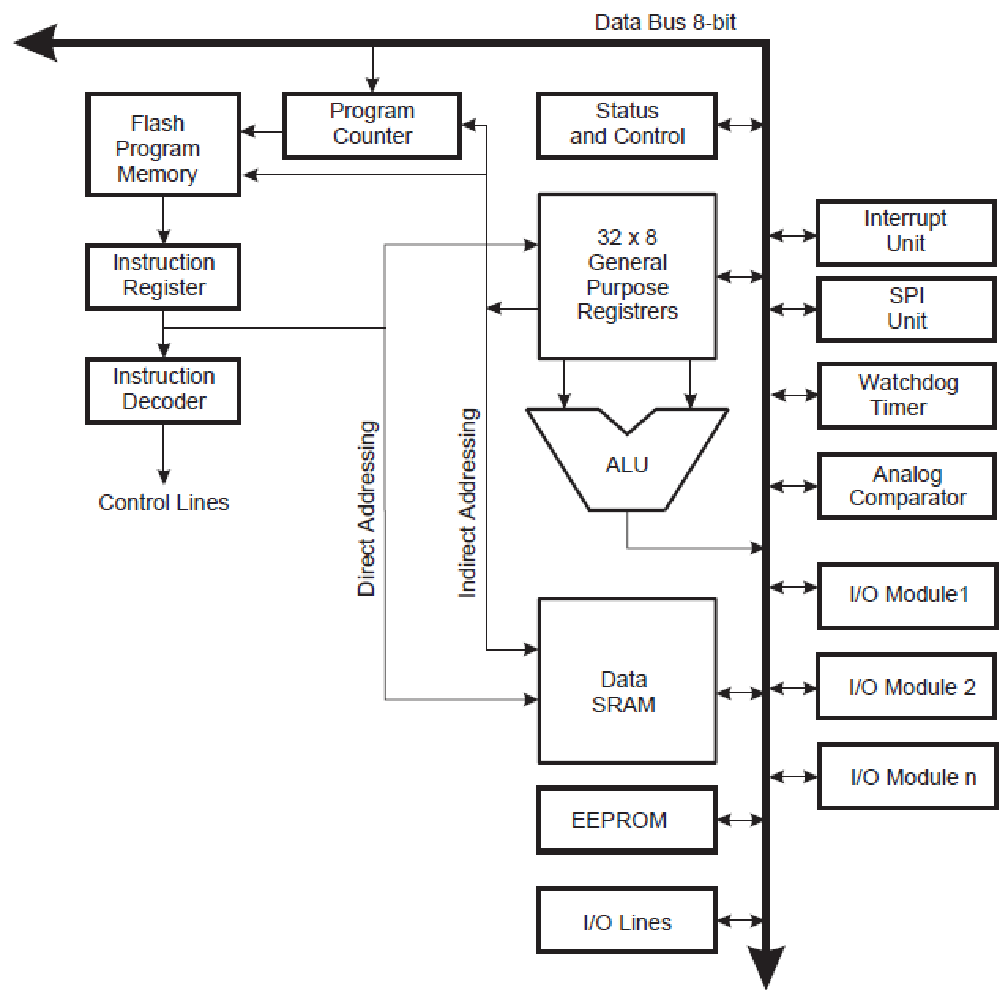
ATMega 168/328 adalah mikrokontroller keluaran dari atmel yangmempunyai arsitektur RISC (Reduce Instruction Set Computer)yang dimana setiap proses eksekusi data lebih cepat dari padaarsitektur CISC (Completed Instruction Set Computer). Mikrokontroler ini memiliki beberapa fitur yaitu :
- 130 macam instruksi yang hampir semuanya dieksekusidalam satu siklus clock.
- 32 x 8-bit register serba guna.
- Kecepatan mencapai 16 MIPS dengan clock 16 MHz.
- 32 KB Flash memory
- Memiliki 1KB EEPROM (Electrically ErasableProgrammable Read Only Memory)sebagai tempat penyimpanan data semi permanentkarena EEPROM tetap dapat menyimpan data meskipuncatu daya dimatikan.
- Memiliki pin I/O digital sebanyak 14 pin 6 diantaranyaPWM (Pulse Width Modulation) output.
- Master / Slave SPI Serial interface.
Mikrokontroller ATmega 168 memiliki arsitektur Harvard,yaitu memisahkan memori untuk kode program dan memori untukdata sehingga dapat memaksimalkan kerja dan parallelisme.Instruksi – instruksi dalam memori program dieksekusi dalam satualur tunggal, dimana pada saat satu instruksi dikerjakan instruksiberikutnya sudah diambil dari memori program. Konsep inilahyang memungkinkan instruksi – instruksi dapat dieksekusi dalamsetiap satu siklus clock.32 x 8-bit register serba guna digunakan untuk mendukungoperasi pada ALU ( Arithmatic Logic unit ) yang dapat dilakukandalam satu siklus. 6 dari register serbaguna ini dapat digunakansebagai 3 buah register pointer 16-bit pada mode pengalamatan taklangsung untuk mengambil data pada ruang memori data. Ketigaregister pointer 16-bit ini disebut dengan register X ( gabungan R26 dan R27 ), register Y ( gabungan R28 dan R29 ), dan register Z ( gabungan R30 dan R31 ).(Putra, 2010)
Hampir semua instruksi AVR memiliki format 16-bit. Setiapalamat memori program terdiri dari instruksi 16-bit atau 32-bit.Selain register serba guna di atas, terdapat register lain yangterpetakan dengan teknik memory mapped I/O selebar 64 byte.Beberapa register ini digunakan untuk fungsi khusus antara lainsebagai register control Timer/ Counter, Interupsi, ADC, USART,SPI, EEPROM, dan fungsi I/O lainnya. Register – register inimenempati memori pada alamat 0x20h – 0x5Fh.(Atmel, 2012)
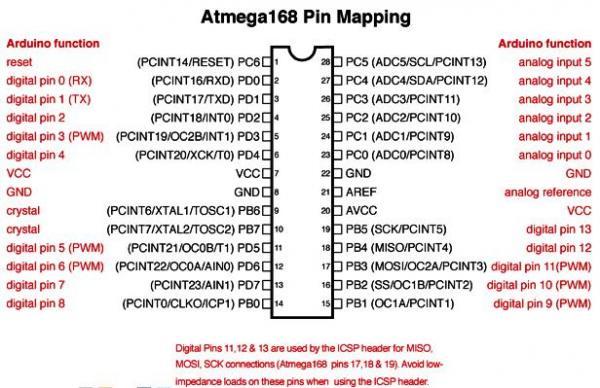
Berikut ini adalah tampilan arsitekturdan konfigurasi pin ATmega 168/328 :
Gambar 2.1 Arsitektur Atmega168/328
Gambar 2.2 Konfigurasi pin Atmega 168/328
2.2.2 Metode Komputasi
Metode Fuzzy
- Logika Fuzzy
Logika Fuzzy merupakan sebuah logika yang memiliki nilai kekaburan atau kesamaran antara benar dan salah. Dalam teori logika fuzzy sebuah nilai bisa bernilai benar dan salah secara bersamaan namun berapa besar kebenaran dan kesalahan suatu nilai tergantung kepada bobot keanggotaan yang dimilikinya.
Dalam teori logika fuzzy dikenal himpunan fuzzy (fuzzyset) yang merupakan pengelompokan sesuatu berdasarkan variabel bahasa (linguistik variable), yang dinyatakan dalam fungsi keanggotaan. Didalam semesta pembicaraan (universe of discourse) U, fungsi keanggotaan dari suatu himpunan fuzzy tersebut bernilai antara 0.0 sampai dengan 1.0. Fungsi keanggotaan dari suatu himpunan fuzzy dinyatakan dengan derajat keanggotaan suatu nilai terhadap nilai tegasnya yang berkisar antara 0,0 sampai dengan 1,0. Jika A: himpunan fuzzy, μA: fungsi keanggotaan dan X : semesta, maka fungsi keanggotaan dalam suatu himpunan fuzzy dapat dinyatakan dengan:
A={(x,μA(x))|xЄX}
Fungsi Keanggotaan suatu himpunan fuzzy dapat ditentukan dengan fungsi segitiga (Triangle), trapesium (Trapezoidal) atau Fungsi Gauss.
- Aritmatika Logika Fuzzy
Dalam system logika fuzzy terdapat beberapa operasi aritmatika yang diperlukan dalam penalarannya antara lain:
- Gabungan (Union) dalam sitem logika fuzzy dikenal dengan istilah Max.
Operasi max dinyatakan dengan persamaan:
C= A B µc (X) = max (µA(X), µB(X)) = µA(X) µB(X)


- Irisan ( Intersaction) dalam sitem logika fuzzy dikenal dengan istilah Min.
Operasi mix dinyatakan dengan persamaan:
C=A B µc(X)=max(µA(x), µB(x))= µA(x) µB(x)


- Kesamaan (Equilaty), operasi kesamaan dinyatakan dengan persamaan:
µA(x) = µB(x);X€U
- Produk (Product), operasi produk dinyatakan dengan persamaan:
µĀ(x)= 1 - µA(x);X€U
- Komplemen (Complement), operasi komplemen dinyatakan dengan persamaan:
µ(A.B)(x)= µA(x). µB(x); X€U
- Cara Kerja Kontrol Logika Fuzzy
Dalam system control logika fuzzy terdapat beberapa tahapan operasional yang meliputi:
- Fuzzyfikasi
Fuzzifikasi adalah suatu proses pengubahan nilai tegas/real yang ada ke dalam fungsi keanggotaan.
- Aturan Dasar (Rule Based)
Aturan dasar (rule based) pada control logika fuzzy merupakan suatu bentuk aturan relasi/implikasi “Jika-Maka” atau “If – Then” seperti pada pernyataan berikut:
“JIKA” X=A DAN “JIKA” Y=B “MAKA” Z=C
- Mesin Penalaran Kontrol Logika Fuzzy
Mesin Penalaran: proses implikasi dalam menalar nilai masukan guna penentuan nilai keluaran sebagai bebtuk Pengambil Keputusan. Salah satu model penalaran yang banyak dipakai adalah penalaran max-min. Dalam penalaran max-min proses pertama yang dilakukan adalah melakukan operasi min sinyal keluaran lapisan fuzzyfikasi, yang diteruskan dengan operasi max untuk mencari nilai keluaran yang selanjutnya akan difuzzifikasikan sebagai bentuk keluaran pengontrol. Operasional max-min tersebut dapat dinyatakan sebagai berikut:
Operasi Min/Irisan
A b = min (a,b) = a if a≤b
= b if a≤b
Operasi Mak/Union
a b = max (a,b) = a if a≥b
= b if a<b
- Defuzzyfikasi
Merupakan proses pemetaan himpunan fuzzy ke himpunan tegas (crips). Proses ini merupakan kebalikan dari proses fuzzyfikasi. Proses defuzzyfikasi diekspresikan sebagai berikut :
Z*=defuzzifier (Z)
Dimana :
Z = Hasil penalaran fuzzy
Z* = Keluaran Kontrol FL
Defuzzifier = Operasi defuzzier
Metode dalam melakukan defuzzifikasi antara lain :
- Metode Max (Maximum)
Metode ini juga dikenal dengan metode puncak dimana nilai keluaran dibatasi oleh fungsi:
c(z*)>c 1 (z)
- Metode Titik Tengah (Center of Area)
Metode ini juga disebut pusat area. Metode ini lazim dipakai dalam proses defuzzikasi. Metode ini diekspresikan dengan persamaan:
z* = μc(z)zdzμc(z)zdz
- Metode Rata-Rata (Average)
Metode ini digunakan untuk fungsi keanggotaan keluaran yang simetris. Persamaan dari metode ini adalah:
z*= μc(z).zμc(z)
- Metode Penjumlah Titik Tengah (Summing of center area)
Metode ini dinyatakan dengan persamaan:
Z*= kn=1μck(z)dzkn=1μcn(z)dz
- Metode Titik Tengah Area Terbesar
Dalam metode ini keluaran dipilih berdasarkan titik pusat area terbesar yang ada. Metode ini dinyatakan dalam bentuk:
Z*= μcm(z).zdzμcm(z)dz
Selanjutnya keluaran keluaran dari defuzzifikasi tersebut akan digunakan sebagai keluaran KLF
2.2.3 Contoh Kasus
Contoh kasus yang diambil adalah persoalan perancangan robot mobil penjejak dinding koridor menggunakan kendali logika fuzzy. Dalam penelitian ini terdapat dua masukan, yaitu masukan kesalahan dan beda kesalahan. Dua masukan tersebut diolah oleh system kendali logika fuzzy yang terdiri atas empat komponen utama yang menyusun proses kendali logika fuzzy, yaitu proses fuzifikasi, basis pengetahuan, logika pengambil keputusan, dan defuzifikasi. Perangkat keras dari sistem yang akan dibangun meliputi sistem minimum mikrokontroler ATMega8535, sensor GP2D12, keypad, LCD, driver motor dc, dan catu daya.
Tahapan – tahapannya :
Pengendali logika fuzzy akan mengevaluasi setiap masukan crisp dari ADC internal ATMega8535 ke dalam 3 tahapan, yaitu fuzzifikasi, evaluasi aturan defuzzifikasi (perhitungan COG).
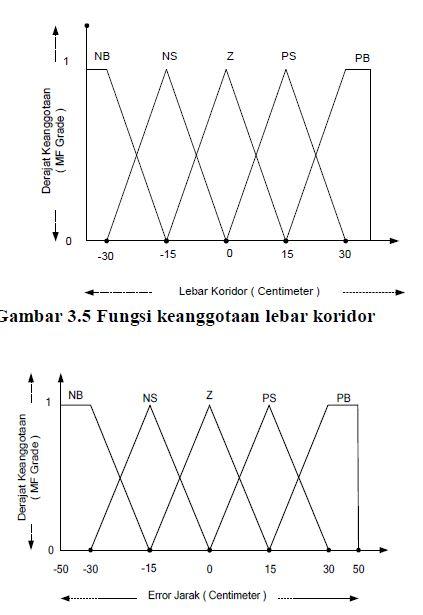
2.2.3.1 Fuzzifikasi
Dalam perancangan kendali logika fuzzy ini terdapat 2 masukan crisp hasil konversi ADC yaitu Lebar Koridor dan Error (beda kesalahan). Tahapan awal proses fuzzifikasi adalah menentukan parameter – parameter fungsi keanggotaan pada setiap himpunan fuzzy masukan.
2.2.3.2 Evaluasi aturan
Evaluasi aturan adalah proses mengevaluasi derajat keanggotaan tiap-tiap fungsi keanggotaan himpunan fuzzy masukan ke dalam basis aturan yang telah ditetapkan. Secara lengkap, jumlah kombinasi yang mungkin dari 2 himpunan fuzzy masukan dengan masing-masing 5 fungsi keanggotaan adalah 52 atau 25 aturan. Keluaran fuzzy akan menentukan kecepatan robot mobil dan kemudi robot mobil ke kiri atau ke kanan. Untuk lebih sederhananya 25 aturan kendali logika fuzzy robot mobil penjejak dinding koridor dapat dilihat pada Tabel berikut:
Tabel 3.1 beas aturan kendali logika fuzzy robot mobile penjejak dinding koridor.
Metode pengambilan keputusan (inferensi) yang digunakan dalam pemrograman ini adalah metode Max-Min.
2.2.3.3 Defuzzifikasi
Tahap terakhir dari metode pengambilan keputusan fuzzy adalah defuzzifikasi. Defuzzifikasi merupakan kebalikan dari proses fuzzifikasi, yaitu mengubah himpunan fuzzy keluaran menjadi keluaran
tegas (crisp). Pengubahan ini diperlukan karena plant hanya mengenal nilai tegas sebagai variabel kendali. Dalam perancangan kendali logika fuzzy ini menggunakan 1 himpunan fuzzy keluaran dengan fungsi keanggotaannya berupa singleton, seperti tampak pada Gambar berikut :
Untuk mendapatkan nilai tegas keluaran dari himpunan-himpunan fuzzy keluaran yaitu dengan menggunakan metode Center Of Gravity (COG). Hasil keluaran yang berupa nilai tegas tersebut menentukan besar kecepatan angular robot . Nilai kecepatan angular inilah yang akan menentukan kecepatan kedua motor pada robot sesuai dengan persamaan (9) :
Di mana :
R V = Kecepatan roda kanan
L V = Kecepatan roda kiri
V(t) = Kecepatan linier robot
w(t) = Kecepatan angular robot
L = Diameter bodi robot yaitu 16 cm
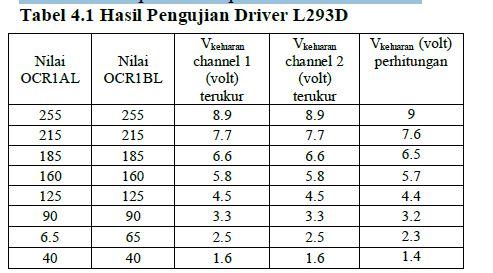
Pengujian Driver Motor DC
Rangkaian driver L293D berfungsi sebagai sistem kemudi motor dc.Pin PD.4 dan PD.5 akan menghasilkan nilai PWM dengan mengatur nilai dari OCR1AL dan OCR1BL. Hasil Pengujian driver motor DC L293D dapat dilihat pada Tabel berikut :
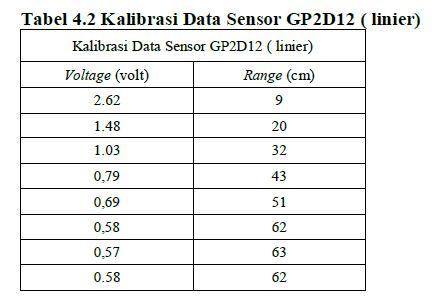
Pengujian Linieritas Sensor GP2D12
Dalam perancangan sensor jarak, GP2D12 digunakan untuk mendeteksi jarak robot dengan dinding dalam jangkauan 10 – 80 cm dengan kenaikan tegangan yang tidak linier. Untuk mendapatkan ukuran yang baik dalam centimeters atau inches harus dibuat fungsi yang mengubah tegangan keluaran menjadi sebuah nilai jarak (range value). Hasil linerisasi sensor setelah melalui fungsi ini dapat dilihat pada Tabel berikut :
Didapatkan hasil nilai jarak dengan kenaikan yang linier walaupun terjadi kesalahan pembacaan tegangan keluaran sensor pada nilai jarak 60 sampai 80 cm hal ini disebabkan oleh terjadi fluktasi tegangan (tegangan yang berubah-ubah).
Gambar 2.19 Kerangka Pemikiran
BAB III
METODOLOGI PENELITIAN
3.1 Analisa Kebutuhan
Pada pembuatan robot berkaki sebelumnya dengan menggunakan 1 buah arduino mengalami kekurangan pada sensor yang dimana sensor termasuk bagian terpenting dari sebuah robot pemadam api untuk menelusuri ruangan mencari titik api tanpa menyentuh dinding.
Gambar. Menggunakan 1 arduino
Maka dilakukan penelitian lebih lanjut dengan menggunakan 2 buah arduino untuk melengkapi kekurangan sensor yang diperlukan pada robot.
Gambar. Menggunakan 2 arduino
Diterapkannya 2 arduino maka sistem penghubung antar kedua arduino itu dengan sistem paralel, 1 sebagai master untuk mengirim perintah 1 sebagai slave sebagai eksekusi.
3.1.1 Metode Pengumpulan Data
Metode pengumpulan data yang digunakan pada penelitian ini yaitu metode kepustakaan, Metode ini digunakan untuk mengumpulkan data-data dan rumus-rumus yang diperlukan dalam kaitannya untuk penerapan Logika Fuzzy pada koneksi dua mikrokontroler.
3.1.2 Jenis Data
Jenis data yang digunakan dalam uji coba pembuatan robot dan untuk pembuatan laporan penelitian ini antara lain :
- Data Primer
- Mencari bahan penggunaan metode fuzzy
- Mencari pembuatan robot berkaki
- Data Sekunder
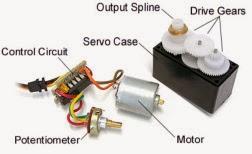
- Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo),
sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor. motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Penjelasan sederhananya begini, posisi poros output akan di sensor untuk mengetahui posisi poros sudah tepat seperti yang di inginkan atau belum, dan jika belum, maka kontrol input akan mengirim sinyal kendali untuk membuat posisi poros tersebut tepat pada posisi yang diinginkan. Untuk lebih jelasnya mengenai sistem kontrol loop tertutup, perhatikan contoh sederhana beberapa aplikasi lain dari sistem kontrol loop tertutup, seperti penyetelan suhu pada AC, kulkas, setrika dan lain sebagainya.
Motor servo biasa digunakan dalam aplikasi-aplikasi di industri, selain itu juga digunakan dalam berbagai aplikasi lain seperti pada mobil mainan radio kontrol, robot, pesawat, dan lain sebagainya.
Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo yang dan terdapat di pasaran, yaitu motor servo rotation 180⁰ dan servo rotation continuous.
- Motor servo standard (servo rotation 180⁰) adalah jenis yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
- Motor servo rotation continuous merupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kiri.
Prinsip kerja motor servo
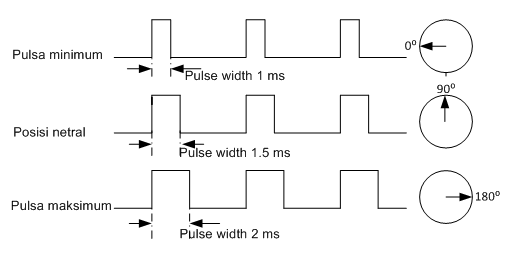
Motor servo dikendalikan dengan memberikan sinyal modulasi lebar pulsa (Pulse Wide Modulation / PWM) melalui kabel kontrol. Lebar pulsa sinyal kontrol yang diberikan akan menentukan posisi sudut putaran dari poros motor servo. Sebagai contoh, lebar pulsa dengan waktu 1,5 ms (mili detik) akan memutar poros motor servo ke posisi sudut 90⁰. Bila pulsa lebih pendek dari 1,5 ms maka akan berputar ke arah posisi 0⁰ atau ke kiri (berlawanan dengan arah jarum jam), sedangkan bila pulsa yang diberikan lebih lama dari 1,5 ms maka poros motor servo akan berputar ke arah posisi 180⁰ atau ke kanan (searah jarum jam). Lebih jelasnya perhatikan gambar dibawah ini.
Ketika lebar pulsa kendali telah diberikan, maka poros motor servo akan bergerak atau berputar ke posisi yang telah diperintahkan, dan berhenti pada posisi tersebut dan akan tetap bertahan pada posisi tersebut. Jika ada kekuatan eksternal yang mencoba memutar atau mengubah posisi tersebut, maka motor servo akan mencoba menahan atau melawan dengan besarnya kekuatan torsi yang dimilikinya (rating torsi servo). Namun motor servo tidak akan mempertahankan posisinya untuk selamanya, sinyal lebar pulsa kendali harus diulang setiap 20 ms (mili detik) untuk menginstruksikan agar posisi poros motor servo tetap bertahan pada posisinya.
- Sensor SRF-05
merupakan sensor pengukur jarak yang menggunakan ultrasonik. Dimana prinsip kerja sensor Ultrasonik ini adalah Pemancar(transmitter) mengirimkan seberkas gelombang ultrasonik, lalu diukur waktu yang dibutuhkan hingga datangnya pantulan dari obyek. Lamanya waktu ini sebanding dengan dua kali jarak sensor dengan obyek, sehingga didapat jarak sensor dengan obyek yang bisa ditentukan dengan persamaan
Jarak = Kecepatan_suara × waktu_pantul/2
Sensor Ultrasonik Devantech srf05 dengan spesifikasi sebagai berikut :
- Bekerja pada tegangan DC 5 volt
- Beban arus sebesar 30 mA – 50 mA
- Menghasilkan gelombang dengan frekuensi 40 KHz
- Jangkauan jarak yang dapat dideteksi 3 cm – 400 cm
- Membutuhkan trigger input minimal sebesar 10 uS
- Dapat digunakan dalam dua pilihan mode yaitu input trigger dan output echo terpasang pada pin yang berbeda atau input trgger dan output echo terpasang dalam satu pin yang sama.
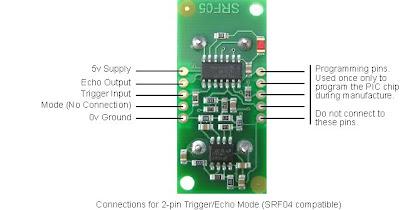
Mode 1- SRF05 - Trigger dan Echo terpisah
Pada mode ini, untuk mengakses input dan output digunakan pin sensor utrasonik yang berbeda. Artinya satu pin akan berfungsi sebagai transmitter dan satu pin sisanya berfungsi sebagai receiver. Jadi antara Triger dan Echo di bedakan.
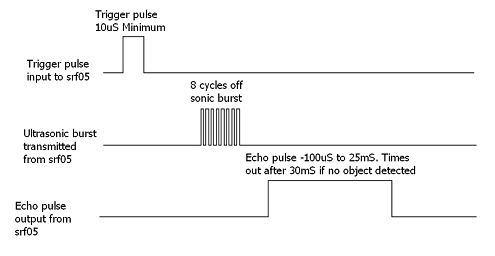
Timing diagram SRF05 mode trigger dan echo yang terpisah adalah sebagai berikut :
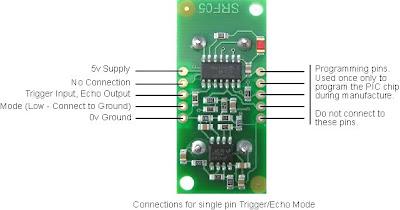
Mode 2- SRF05 - Trigger dan echo dalam 1 pin
Pada mode ini menggunakan 1 pin untuk digunakan sebagai trigger dan echo. Untuk menggunakan mode ini, hubungkan pin mode pada 0V / ground. Sinyal echo dan sinyal trigger di dapat dari 1 pin saja dengan delay antara sinyal trigger dan sinyal echo kurang lebih 700 us
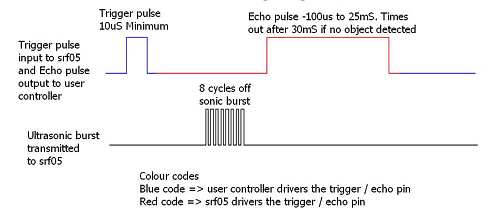
Timing diagram SRF05 mode trigger dan echo yang jadi satu adalah sebagai berikut :
- Sensor Flame / Api
Terdapat dua jenis sensor api yang sering digunakan yaitu Hamamatsu UVTRON yang mendeteksi titik api dengan mencari sinar ultraviolet dan TPA81 yang menggunakan inframerah.
Hamamatsu UVTRON R9454
UVTRON Sensor R2868 atau R9454
Merupakan sensor api produksi Hamamatsu dan penyempurnaan dari versi sebelumnya R2868. Sensor ini memiliki ketahanan 10x lebih besar dari R2868 yaitu ( 10.000 m/s2 ). Sensor UVTRON dapat mendeteksi titik api dari jarak 5 meter. Sensor ini membutuhkan tegangan DC yang cukup besar, yaitu 400 VDC. Untuk mempermudah pengguna dalam memakai sensor ini maka tersedia rangkaian driver C10423 yang menjadi antarmuka UVTRON dengan mikrokontroler. C10423 akan membangkitkan tegangan 400 Volt DC dan membangkitkan pulsa level TTL sehingga dapat dihubungkan langsung ke mikrokontroler
UVTRON Driver C10423
TPA81 Thermopile Array
TPA81 Thermophile Array
Tidak sejauh UVTRON yang mampu mendeteksi api pada jarak 5 meter, sensor ini hanya mendeteksi api pada jarak 2 meter. Namun UVTRON memiliki sudut yang cukup luas dalam mendeteksi titik api sehingga posisi api masih belum dapat dipastikan. Sedangkan Thermophile Array akan mendeteksi posisi titik api berdasarkan pixel-pixel yang mendeteksi cahaya inframerah dari api. Antarmuka TPA81 adalah dalam bentuk I2C.
3.2 Peracangan Penelitian
3.2.1 Konteks Diagram
Diagram konteks merupakan gambaran awal dari sebuah sistem secara umum, yang menggambarkan sistem secara general beserta hubungannya dengan lingkungan luar dan bagaimana sistem ini berinterakasi. Diagram konteks ini merupakan diagram tingkat atas, yaitu diagram yang menggambarkan proses paling tidak detail dari sebuah sistem informasi yang menggambarkan aliran data ke dalam dan keluar
Diagram gambar 3.1
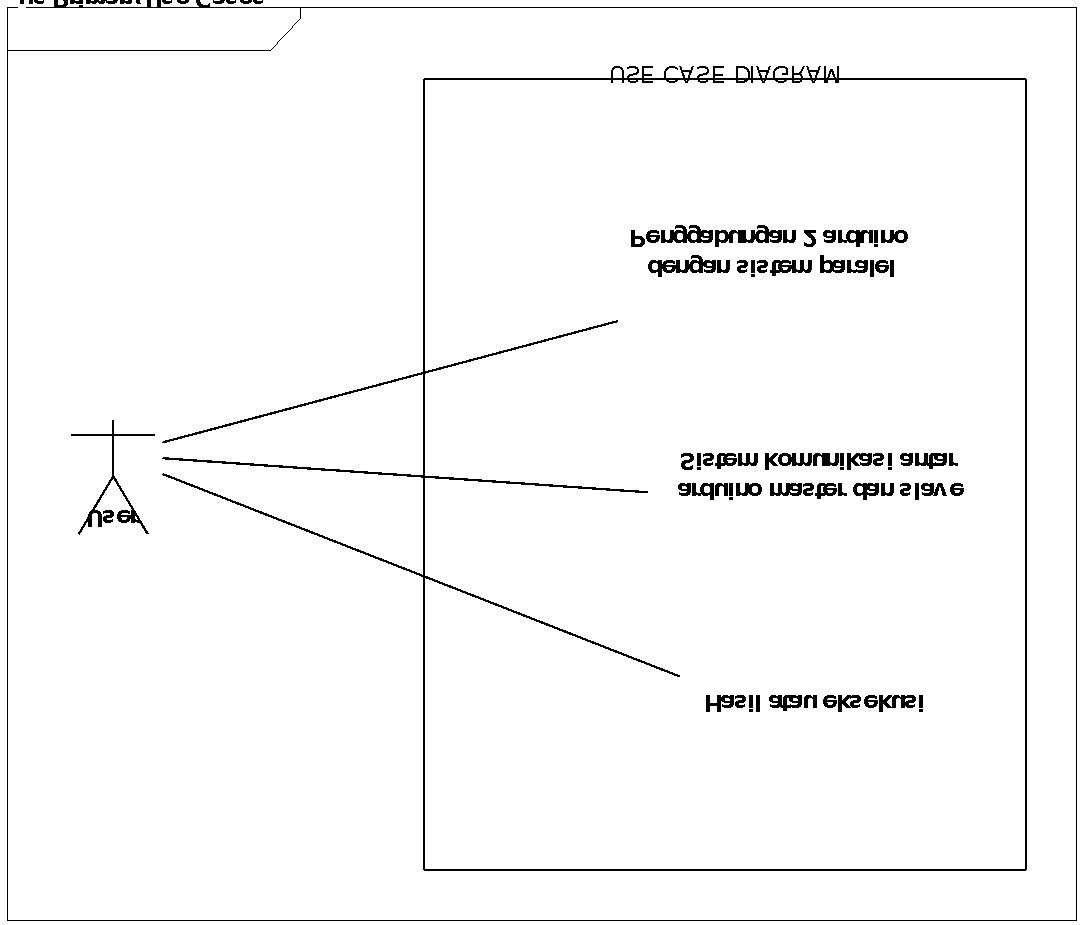
3.2.2 Use Case Diagram
Berikut diagram use case alur 2 arduino:
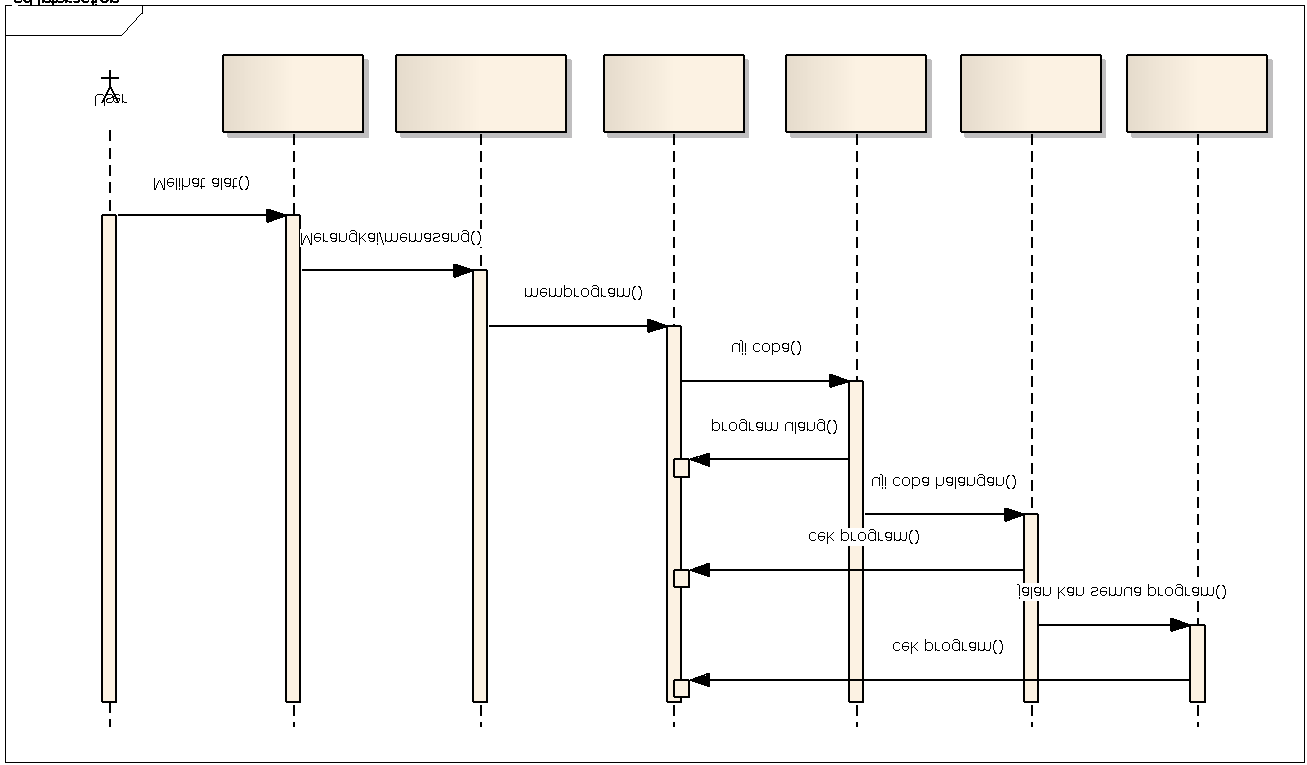
3.2.3 Sequence Diagram
Sequence gambar dibawah :
3.2.4 Activity Diagram
Aktivity untuk perakitan seperti gambar dibawah :
3.3 Teknik Analisa Data
3.3.1 Fuzifikasi
Penentuan jarak pada sensor ultrasonik untuk kebutuhan menelusuri dinding dengan menentukan jarak pada sensor agar sesuai dengan medan yang dilewati proses dengan fuzifikasi :
Sensor
|
Sangat dekat
|
Dekat
|
Jauh / Kosong
|
Depan
|
0-6 cm
|
8-15 cm
|
>50 cm
|
Kanan
|
0-6 cm
|
8-15 cm
|
>50 cm
|
Kiri
|
0-6 cm
|
8-15 cm
|
>50 cm
|
Belakang
|
0-6 cm
|
8-15 cm
|
>50 cm
|
Sistem pembacaan jarak sensor :
Sensor
|
Jarak sesungguhnya
|
Jarak yang di baca
|
Depan
|
10 cm
|
11 cm
|
Kanan
|
10 cm
|
11 cm
|
Kiri
|
10 cm
|
11 cm
|
Belakang
|
10 cm
|
11 cm
|
Untuk langkah awal pemograman dasar dengan hasil dari fuzifikasi maka ketentuan dibuat sebagai berikut :
- jika <= 8 maka output yang dihasil kan = 0
- jika >= 8 maka output yang dihasil kan = 1
3.3.2 Sampel Pengujian sensor
No. Urutan
|
Depan
|
Kanan
|
Kiri
|
Belakang
|
Hasil / output
|
0
|
0
|
0
|
0
| ||
0
|
0
|
0
|
1
| ||
0
|
0
|
1
|
0
| ||
0
|
0
|
1
|
1
| ||
0
|
1
|
0
|
0
| ||
0
|
1
|
0
|
1
| ||
0
|
1
|
1
|
0
| ||
0
|
1
|
1
|
1
| ||
1
|
0
|
0
|
0
| ||
1
|
0
|
0
|
1
| ||
1
|
0
|
1
|
0
| ||
1
|
0
|
1
|
1
| ||
1
|
1
|
0
|
0
| ||
1
|
1
|
0
|
1
| ||
1
|
1
|
1
|
0
| ||
1
|
1
|
1
|
1
|
BAB IV
HASIL DAN PEMBAHASAN
4.1 HASIL
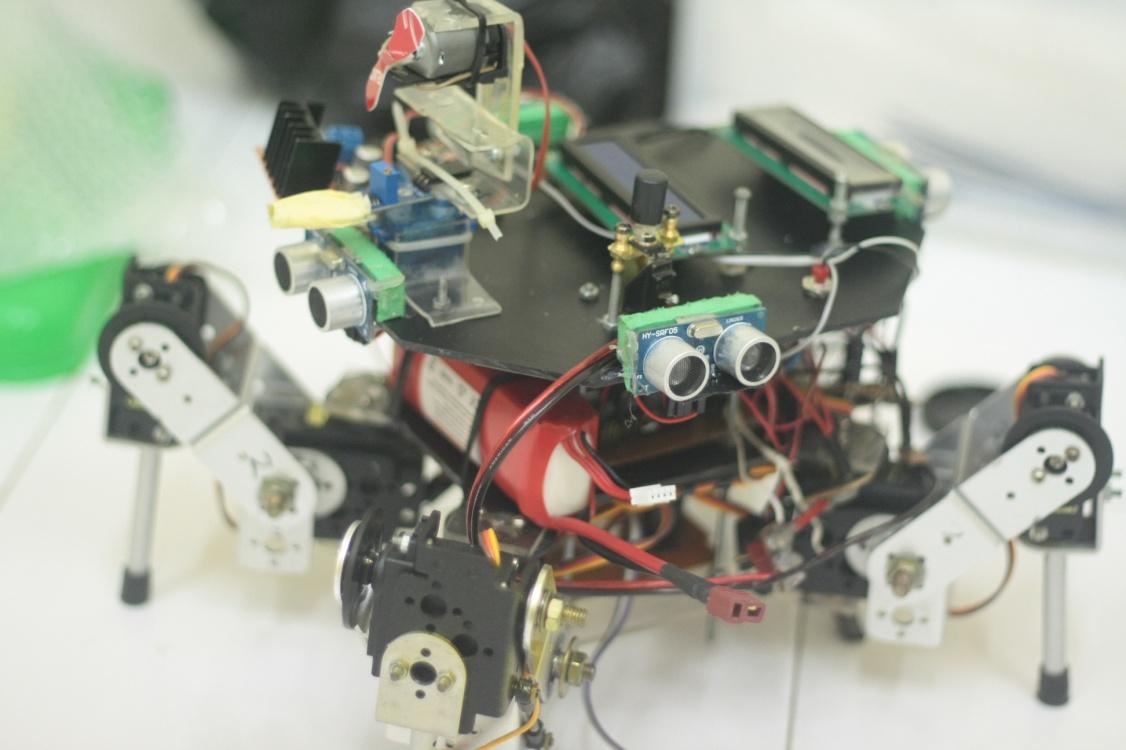
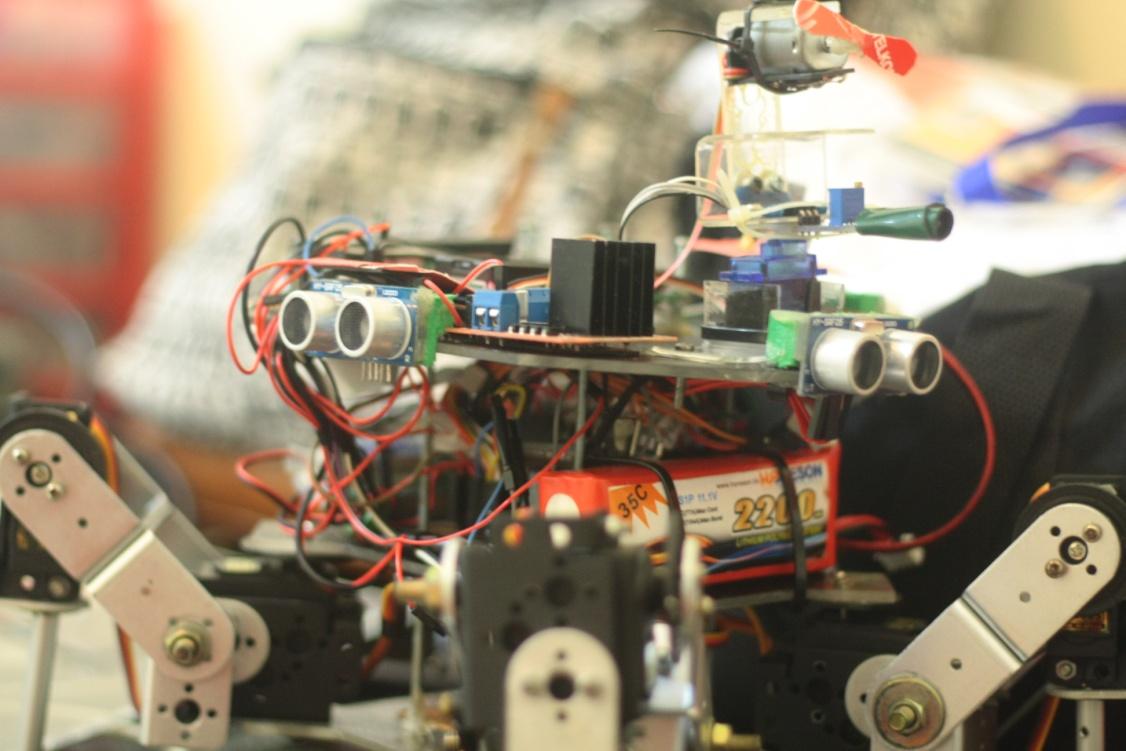
Dari percobaan eksperimen robot berkaki yang dibuat pada penelitian ini yaitu sebagai berikut :
Dari gambar di atas robot ini menggunakan 4 sensor ultrasonik yaitu depan, kanan, kiri dan belakang yang dimana menggunakan 2 mikroprosesor dengan sistem kendali paralel yang berfungsi sebagai master pengirim data dan slave sebagai penerima data atau eksekusi.
4.2 PEMBAHASAN DAN PENGUJIAN
4.2.1 Pengujian sensor
Pengujian ini untuk mengetahui respon dari sensor terhadap gerak yang dilakukan pada rintangan yang ada.
No. urutan
|
Depan
|
Kanan
|
Kiri
|
Belakang
|
Hasil / output
|
0
|
0
|
0
|
0
|
Putar
| |
0
|
0
|
0
|
1
|
Mundur
| |
0
|
0
|
1
|
0
|
Belok kiri
| |
0
|
0
|
1
|
1
|
Belok kiri
| |
0
|
1
|
0
|
0
|
Belok kanan
| |
0
|
1
|
0
|
1
|
Belok kanan
| |
0
|
1
|
1
|
0
|
Belok kanan
| |
0
|
1
|
1
|
1
|
Belok kiri
| |
1
|
0
|
0
|
0
|
Maju
| |
1
|
0
|
0
|
1
|
Maju
| |
1
|
0
|
1
|
0
|
Maju
| |
1
|
0
|
1
|
1
|
Belok kiri
| |
1
|
1
|
0
|
0
|
Maju
| |
1
|
1
|
0
|
1
|
Belok kanan
| |
1
|
1
|
1
|
0
|
Maju
| |
1
|
1
|
1
|
1
|
Maju
|
4.2.2 Pengujian pretest dan posttest
No
|
Parameter
|
1 (satu) arduino / mikrocontroller
|
2 (dua) arduino / mikrocontroller
|
1.
|
Menggunakan Sensor
|
Tidak
|
Ya
|
2.
|
Robot dapat berjalan melewati dinding
|
Tidak
|
Ya
|
3.
|
Robot dapat mendeteksi api
|
Tidak
|
Ya
|
4.
|
Gerakan stabil
|
Tidak
|
Ya
|
5.
|
Berkaki 4
|
Ya
|
Ya
|
Dari tabel diatas bahwa banyak perubahan dari robot sebelumnya dan yang sekarang.
BAB V
PENUTUP
5.1 Kesimpulan
Dari perencanaan pembuatan, rancangan, pengujian dan analisis yang telah dilakukan dari robot sekarang dan sebelumnya maka dapat di simpulkan sebagai berikut :
- Kelengkapan dari robot berkaki yang sebelumnya yang tidak menggunakan sensor, dan pada robot sekarang robot kekurangan sensor tersebut telah terpenuhi.
- Keaslian dari sensor jarak untuk dinding dan api berpengaruh terhadap hasil yang di peroleh dan efektif dari pembacaan lebih akurat.
- Penggunaan arduino nano V3, menghemat tempat pada robot yang kecil.
5.2 Saran
Dari penelitian yang telah dilakukan masih banyak kekurangan pada robot pemadam api (berkaki) ada beberapa alat yang harus di tambah dan di ganti untuk mendukung robot mencari titik api :
- Sensor kompas diperlukan pada robot agar dapat seimbang dalam melalui rintangan.
- Sensor jarak yang asli agak pembacaan jarak efektif tapi harga relatif mahal.
- Dan di anjurkan menggunakan sensor deteksi benda untuk mendeteksi boneka yang digunakan penghalang pada lomba.
- Untuk gerak kaki juga di sarankan agar menggunakan mikroprosesor yang khusus dari arduino agar kelistrikan stabil dan jalan robot pun stabil.
- Perubahan pada tampilan body yang lebih rapi pada selanjutnya lebih bagus agar terlihat menarik dan tidak berantakan.
Daftar Pustaka
Rancang Bangun Robot Quadropod Pendeteksi Halangan Dengan Menggunakan Logika Fuzzy (Brahmanto Utama Atmaja,2011).
Implementasi MetodeFuzzy Logic untuk Kontrol Pergerakan Autonomous Mobile Robot pada Aplikasi Soccer Robot (Moh. Hisyam Fithrony, 2012).









